
Avian-Inspired Flight Using a Distributed Robotic Surface
Research
The use of drones is continually expanding in scope as industry and the military increases its focus on remotely piloted or autonomous systems, placing more demand on the aircraft’s performance and capabilities. These demands include bringing unmanned aircraft into operational environments cluttered with obstructions, including urban canyons, valleys, and beneath forest canopies, all of which present navigation hazards and communication difficulties. Furthermore, these environments feature relatively large-scale turbulent wind speed fluctuations compared to the velocity of the vehicle.
To address these concerns, we have decided to look to nature for inspiration. Through passive and active flow control over their wings, birds are able stabilize their heads while flying in moderate turbulence, and their increased flow control precision due to feather deflection and wing warping provides enhanced stability in the kinds of turbulent flows that are common in urban or otherwise cluttered environments. This project aims to develop a distributed robotic surface composed of an array of flaps that mimics many of the sensing, actuation, and feedback control mechanisms inherent in avian wings.
Objectives
- Synthesize a neural network to build a low-dimensional abstract representation of the wing. This abstraction captures the coupling between flap modules and the fluid to the extent that decentralized sensing and control can be executed.
- Design and fabricate a multifunctional wing section for wind tunnel validation. This platform consists of a 3-station wing section, each station with 8 flap modules, for wind tunnel experimentation. Each module has its own microcontroller for sensing, motor control, and communication, creating a decentralized system robust to individual failures.
- Design and validate an adaptive, decentralized estimation and control algorithm. To partially decentralize the system, the estimators and controllers use detailed local information and compiled information from most distant modules. This estimation scheme is iteratively improved using reinforcement learning to discover features of the wind inputs that determine the best responses of the system.
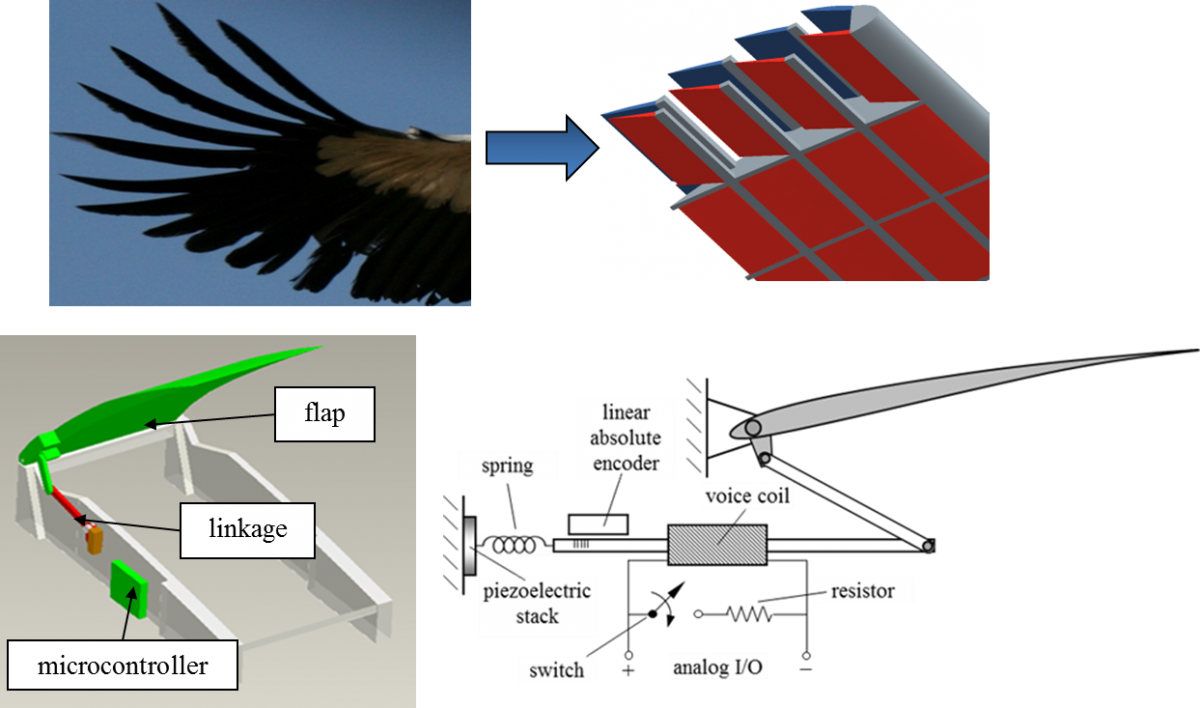
Array of flap modules mimics the sensing and control authority of feathered wings. Each module consists of an aerodynamic flap, a mechanical linkage, and a microcontroller. Components are flush with the spars so as to not impede the flow through the wing. Displacement and torque are measured by the encoder and piezoelectric stack, respectively. When in sensing mode, the voice coil measures the velocity of the flap, while in actuator mode velocity is prescribed. A relay can toggle the mode of the module. Supporting electronics (not shown) are used to harvest energy from the coil
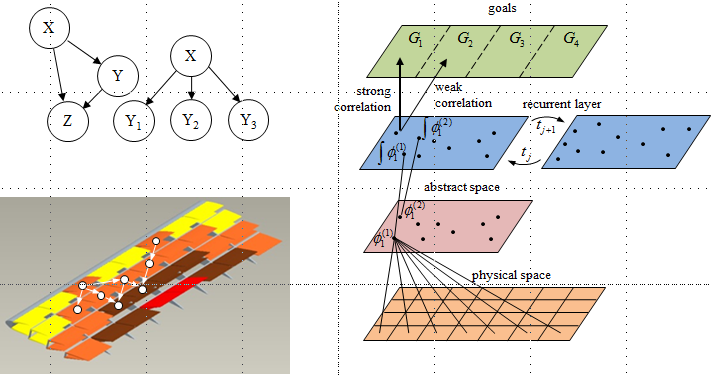
The network of flaps modules is decentralized, meaning decisions are made locally. This speeds up the response and makes the network resilient to damage. An artificial neural network learns the correlation between motions in physical space and (often competing) goals. The network is trained to find abstractions that are only strongly correlated to one goal. A hidden recurrent layer integrates functions of the abstract states over a given time interval to evaluate the rewards for each goal.
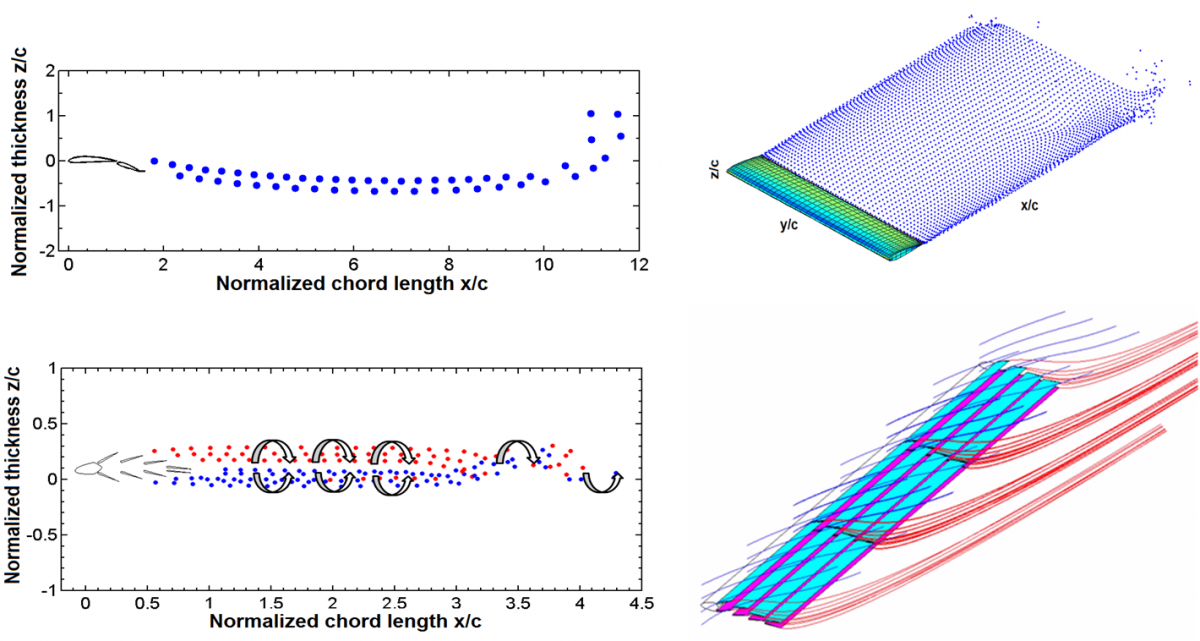
In-house code has been developed for modeling the dynamics of the wing section and wind gusts. To calculate the aerodynamic loads, we have written a custom panel method-based tool in MATLAB based on a source-doublet-panel method with vortex-wake particles coupled to an integral boundary layer solver. Wakes are shed from each body and convected downstream as vortex particles. The code determines if the airfoil should be divided into multiple lifting bodies—for example, if there is significant flow transpiring through the structure—or if bodies should be combined–if one is enveloped in the wake of another. The boundary layer model accounts for transition to turbulence, separation and reattachment, and unsteady vortex shedding from the trailing edge.
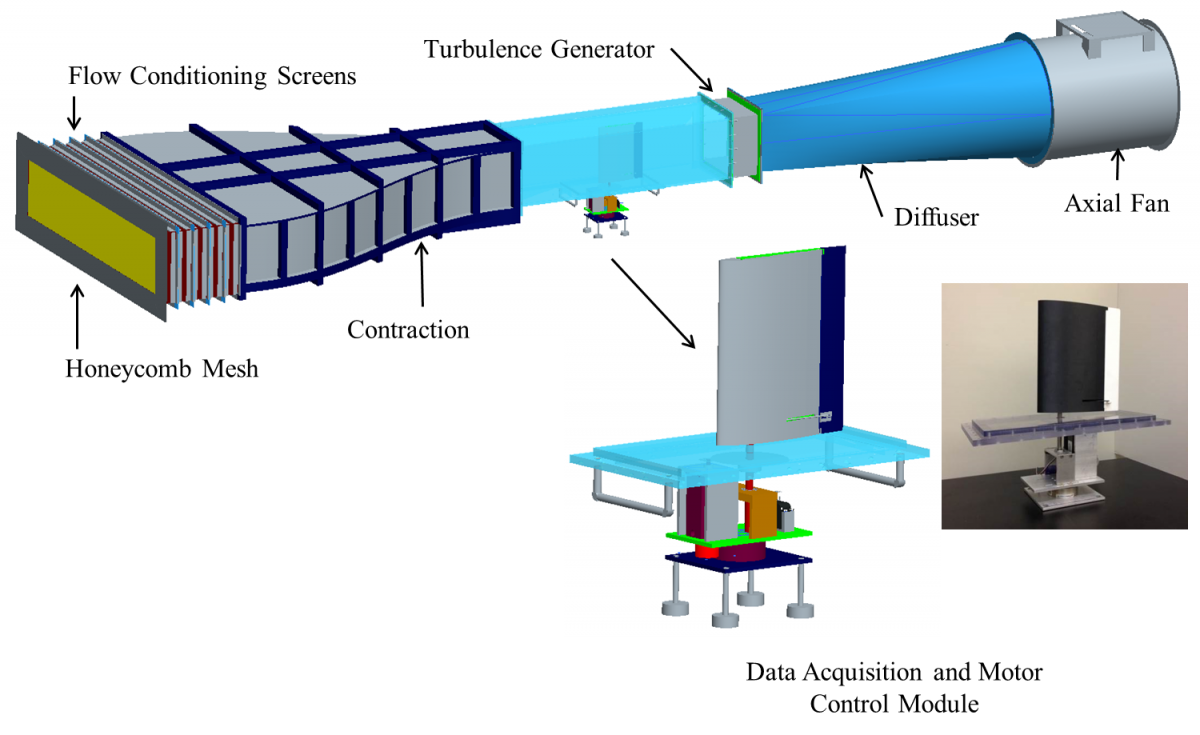
The George Washington University Suction Wind Tunnel
- Velocity Range: 0 – 30 m/s
- Test Section Dimensions: 48” x 12” x 12”
- ½” Polycarbonate Lexan is used for the test section construction.
- Refractive index: 1.52
- Modular design to allow wing sections to be interchanged with ease
Funding sources
- “Synthesis and Analysis Of De-Centralized Control Laws For Wing Sections Using Biomimetic “Feathers” For Gust Alleviation And Maneuverability,” AFRL, 2012.
- “Gust Alleviation at Low Reynolds Number Through Controlling Semi-Active Wing Deformation,” AFRL, 2013.
- “Decentralized, Semi-Active Flow Control over Wings for Gust Alleviation,” AFRL, 2016.
Publications
- Dhruv, A., Blower, C. J., and Wickenheiser, A. M. 2015 “A three dimensional unsteady iterative panel method with vortex particle wakes and boundary layer model for bioinspired multi-body wings,” Proc. SPIE, Vol. 9429, 942916.
- Dhruv, A., Blower, C. J. and Wickenheiser, A. 2014 “A Three Dimensional Iterative Panel Method for Bio-Inspired Multi-Body Wings,” Proc. SMASIS2014.
- Blower, C. J., Dhruv, A., and Wickenheiser, A. M. 2014 “A two-dimensional iterative panel method and boundary layer model for bio-inspired multi-body wings,” Proc. SPIE, Vol. 9055, 90550V.
- Blower, C. and Wickenheiser, A. 2013 “The Validation of a Generalized Aerodynamic Model for a Multi-Body Bio-Inspired Wing,” Proc. SMASIS2013.
- Blower, C. J. and Wickenheiser, A. M. 2012 “The Variations in Active Panel Location and Number for a Bio-Inspired Aircraft Gust Alleviation System,” Proc. SMASIS2012.
- Blower, C. J., Lee, W. and Wickenheiser, A. M. 2012 “The development of a closed-loop flight controller with panel method integration for gust alleviation using biomimetic feathers on aircraft wings,” Proc. SPIE, Vol. 8339, 83390I.
- Blower, C. and Wickenheiser, A. M. 2011 “The Development of a Closed-Loop Flight Controller for Localized Flow Control and Gust Alleviation Using Biomimetic Feathers on Aircraft Wings,” Proc. SMASIS2011.
- Blower, C. J. and Wickenheiser, A. M. 2011 “Two-Dimensional Localized Flow Control Using Distributed, Biomimetic Feather Structures: A Comparative Study,” Proc. SPIE, Vol. 7975, 79750L.
- Blower, C. J. and Wickenheiser, A. M. 2010 “Biomimetic Feather Structures for Localized Flow Control and Gust Alleviation on Aircraft Wings,” 21st International Conference on Adaptive Structures and Technologies (on CD).